|
|
|
|
Department of Mechanical, Nuclear and Production Engineering |


MICROASSEMBLY
Scientific Coordinator: Prof. Marco Santochi
MICROASSEMBLY Scientific Coordinator: Prof. Marco Santochi
|
Overview
|
Problems Whereas in the macroscale
many devices (grippers, robots, feeders) have been used to automate nearly all
assembly operations, on the contrary in the microscale the effort to develop
similar systems is at an early stage. The microassembly operations
are the same as in standard assembly (handling, gripping, feeding, fixing/joining,
selecting, orienting, control, etc..), but for components with at least one
dimension less than one millimetre physical phenomena as superficial adhesive
forces, Van der Waals attraction and electrostatic force, not relevant in
standard assembly, play a key role.
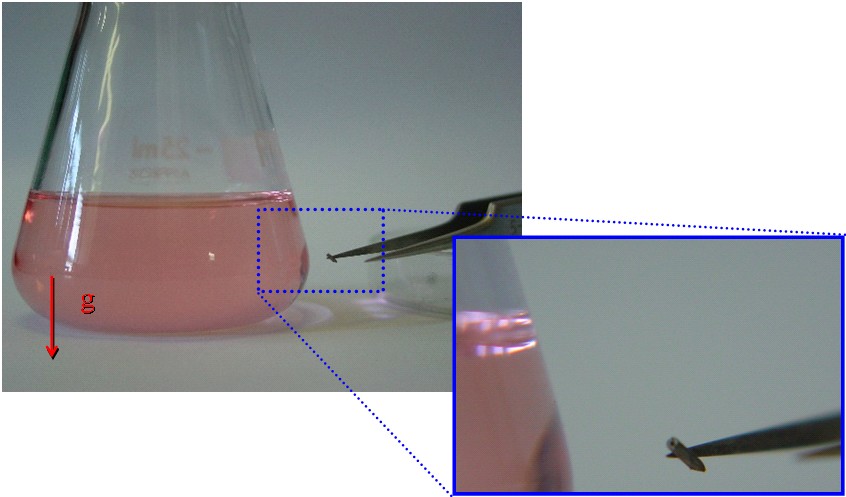
In the microscale, for
example, the gravity force becomes negligible, for the low mass of the
microparts, compared to the adhesion/superficial forces with
evident problems in
detaching and releasing the handled microcomponents.
Whereas the low weight of
microparts represents a problem, on the contrary it can be the opportunity for
adopting new handling principles suitable for microassembly. For example several
research works deal with the problem of non-contact handling: sonotrodes have
been proposed and tested to handle fragile components, laser pressure has been
used to manipulate living cells, electrostatic field to move miniature polymeric
parts, dielectrophoresis to separate, trap and classify bacteria and cells, etc...
So an interesting research activity is that of analysing and testing the
possibility of transferring a physical or chemical principle into the assembly
filed.
|
Last Update 2004/06/01 |