|
|
|
|
Department of Mechanical, Nuclear and Production Engineering |


MICROASSEMBLY
Scientific Coordinator: Prof. Marco Santochi
MICROASSEMBLY Scientific Coordinator: Prof. Marco Santochi
|
Overview
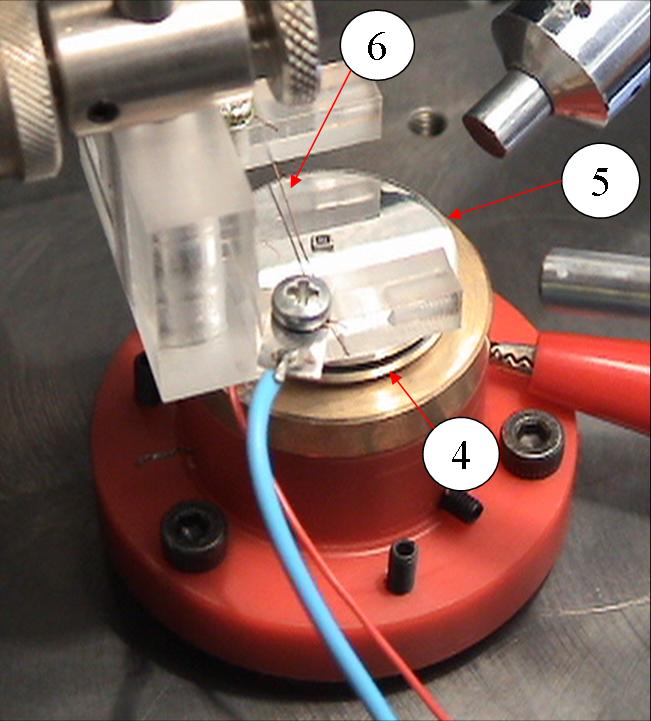
| Contacless Handling of microparts: The 3 Degrees of Freedom MicroManipulator. The physical principle The research work focuses on the development of a contact- less electrostatic “gripper” able to orient and move mini and micro-components. The aim of the gripper is the handling of a wide range of components, different in dimensions, shapes and materials. The physical principle is that both conductive and dielectric objects are attracted towards regions with an higher electric field, so, by creating a gradient of electric field, it is possible to move microparts without coming into contact with them. The experimental set-up Under Construction
Figure 1a - Photo of the experimental apparatus |
Last Update 2004/05/27 |